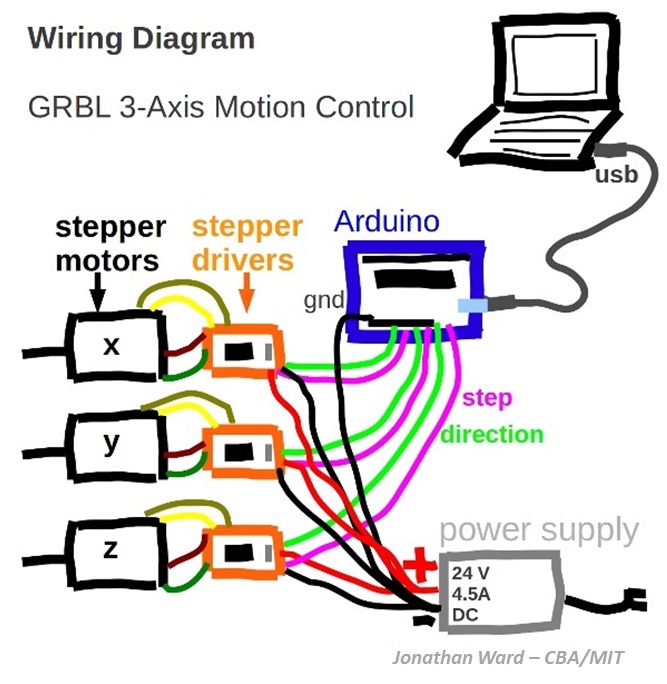
In this assignment we seek ways to automate MTM Snap machine, following the tutorial of J.Ward and N. Peek. http://mtm.cba.mit.edu/machines/mtm_snaplock/build/electronics.html.
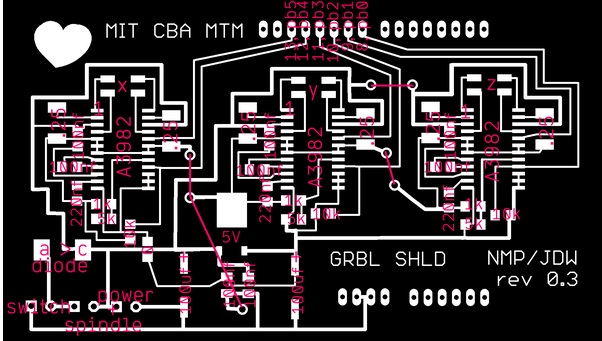
First we milled the universal board called grbl-shield. This board containing the three stepper drivers that we need. However we had not all components, whereby Roberto redesign a new version of stepper board adapted for local components (H-Bridge)
 |
 |
 |
|
Grbl - SHLD traces |
Grbl - SHLD board |
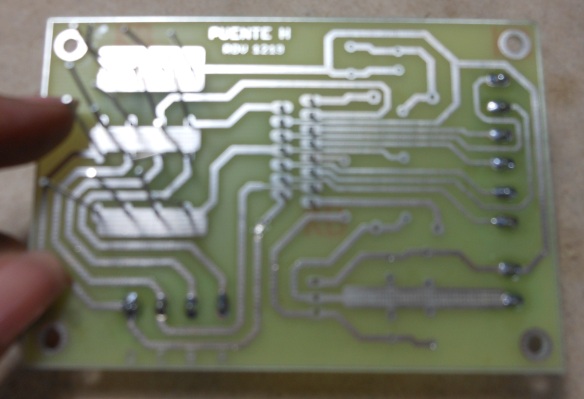
H-Bridge (adaptation by R.Delgado) |
|
 |
 |
 |
|
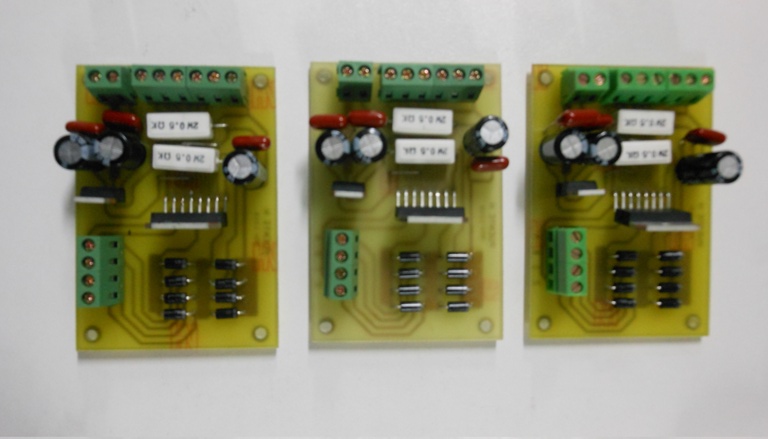
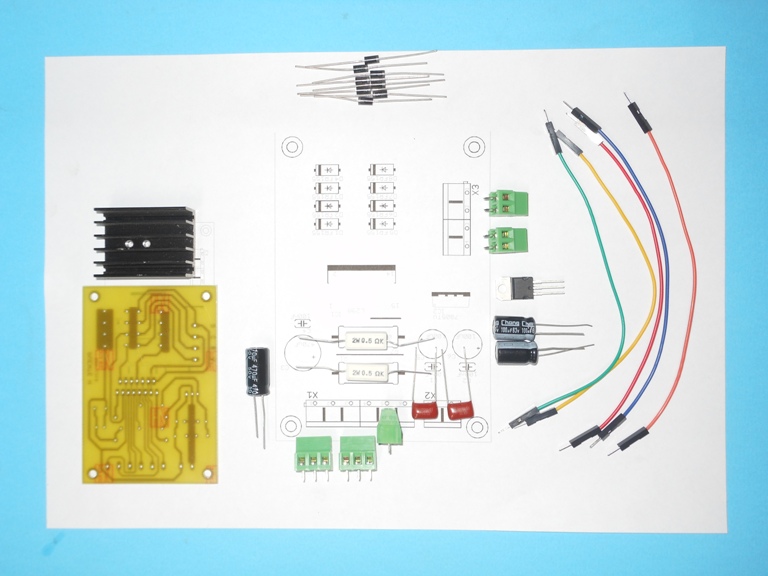
Steppers driver (H-Bridge) |
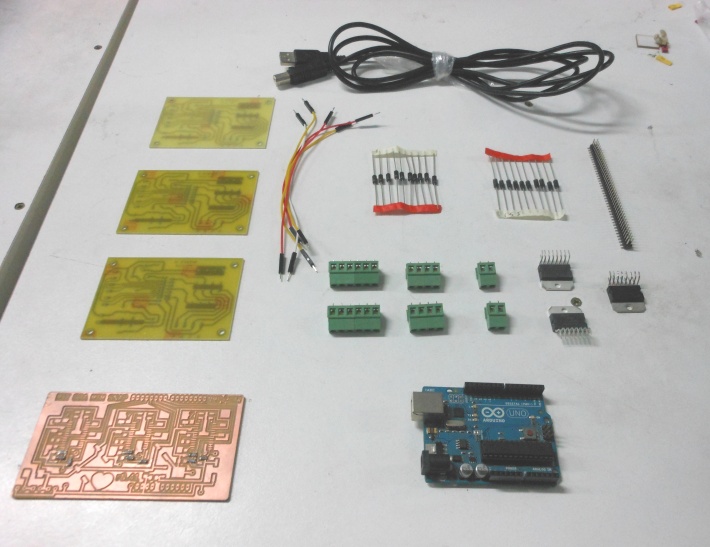
Components 1 |
Components 2 |
|
|
|||
 |
 |
 |
|
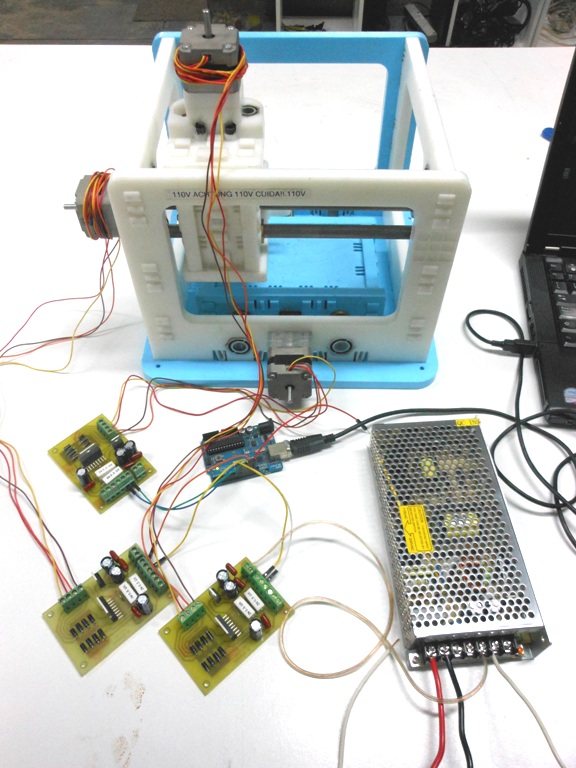
Final Comments: For this assignment I worked with Roberto and Alejandro, whom I have been learning of electronic and mechanical topics. We will continue working on the process, while reaching all components for the Shield board.